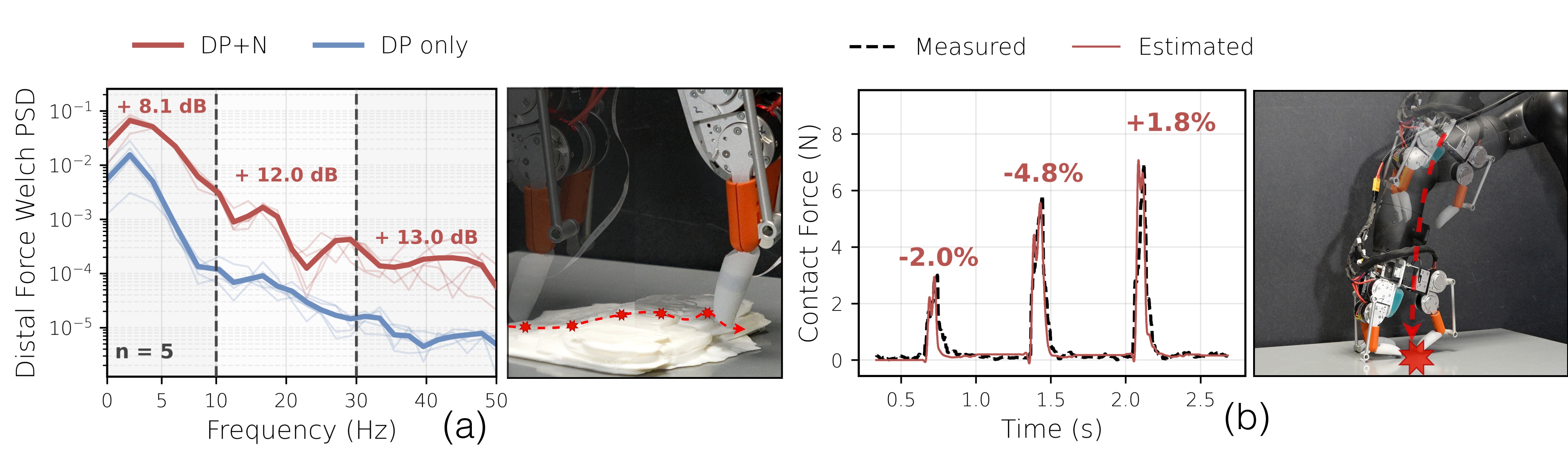
Design Overview
The PLATO Hand combines a hybrid rigid-soft fingertip with quasi-direct drive (QDD) actuators and a linkage mechanism. The fingernail not only increases flexural rigidity at the fingertip, stabilizing the soft pulp to enlarge contact area for adaptive and stable grasping, but also provides a rigid and concentrated contact point for transparent force transmission. Combined with high-bandwidth proprioceptive actuation, the PLATO Hand achieves precise dexterous manipulation across a variety of challenging tasks.

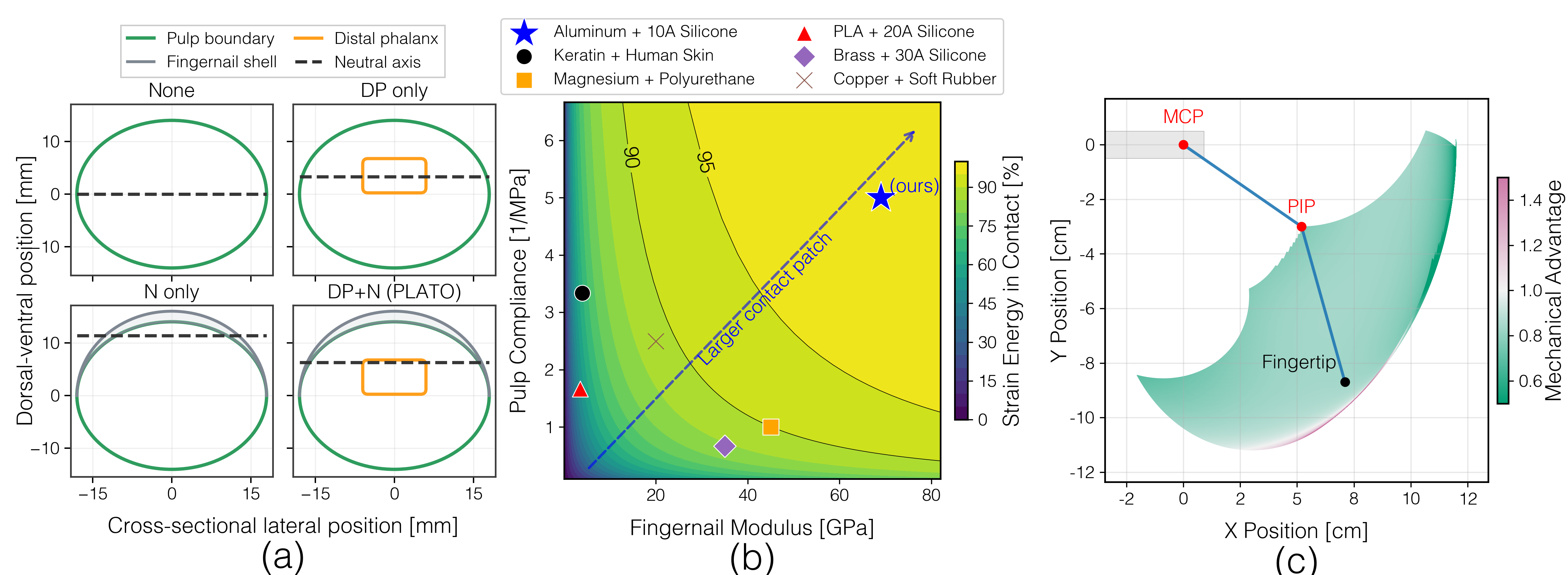
The PLATO Hand employs a biomimetic fingertip that combines a rigid fingernail with a compliant, deformable fingerpulp to structure local contact mechanics. This hybrid construction separates local contact compliance from global fingertip stiffness, allowing deformation during contact to be shaped independently of overall rigidity. The bending-indentation model explains this design goal: the fingertip should resist folding around the object while still allowing the pulp to indent locally and form a stable contact patch.
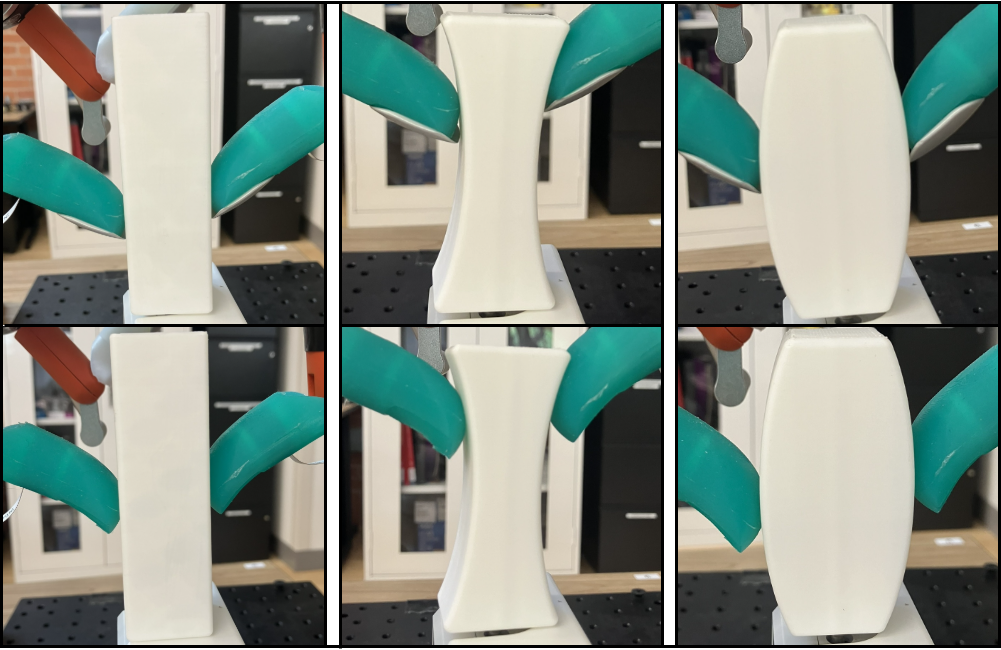
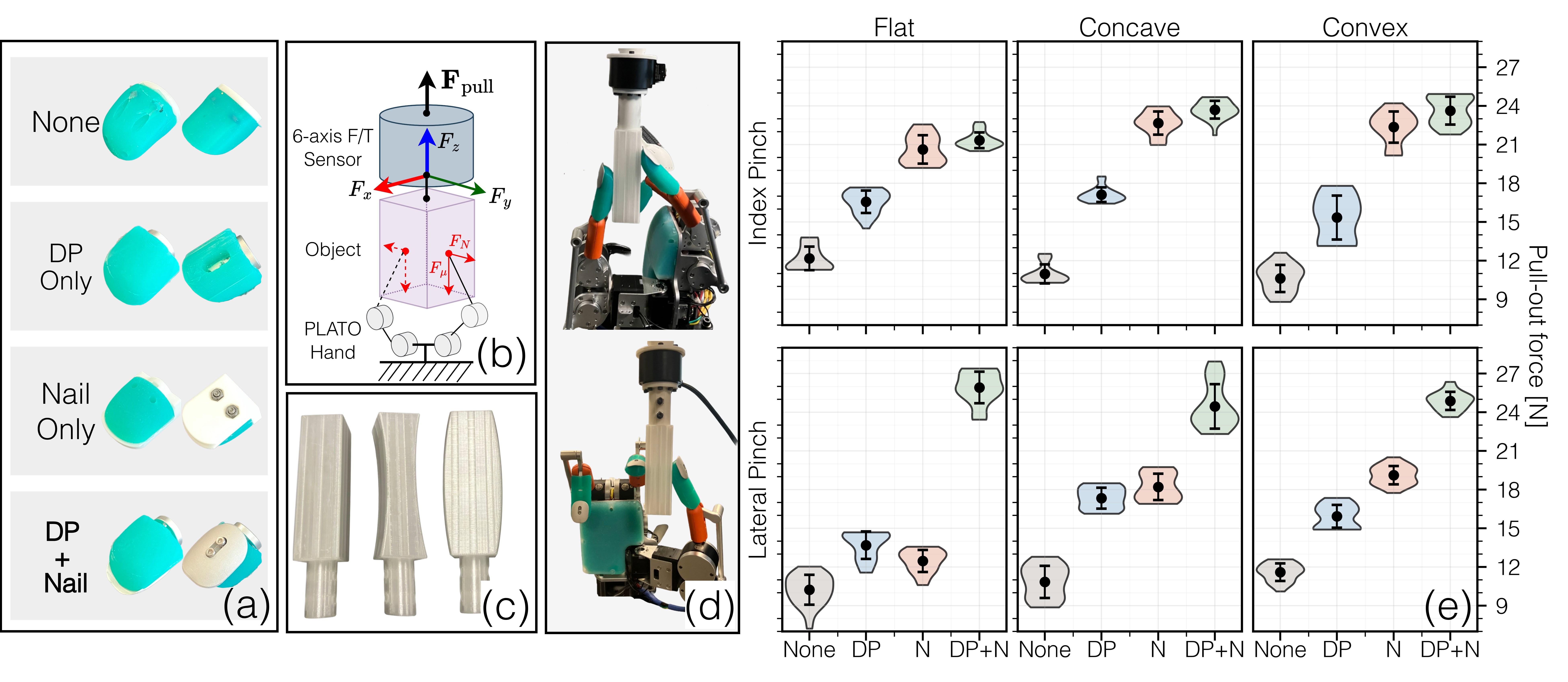
The fingernail improves pinching stability by stabilizing contact during pullout. Tests on flat, concave, and convex surfaces showed that fingertips with a rigid fingernail (top) consistently achieved higher pullout forces than fingertips without one (bottom). The fingernail prevents the fingertip from bending by redirecting strain energy into local indentation to its pulp, which helps maintain stable contact with the object. This effect is especially noticeable on curved surfaces and becomes even more important when the fingertip pulp is softer.
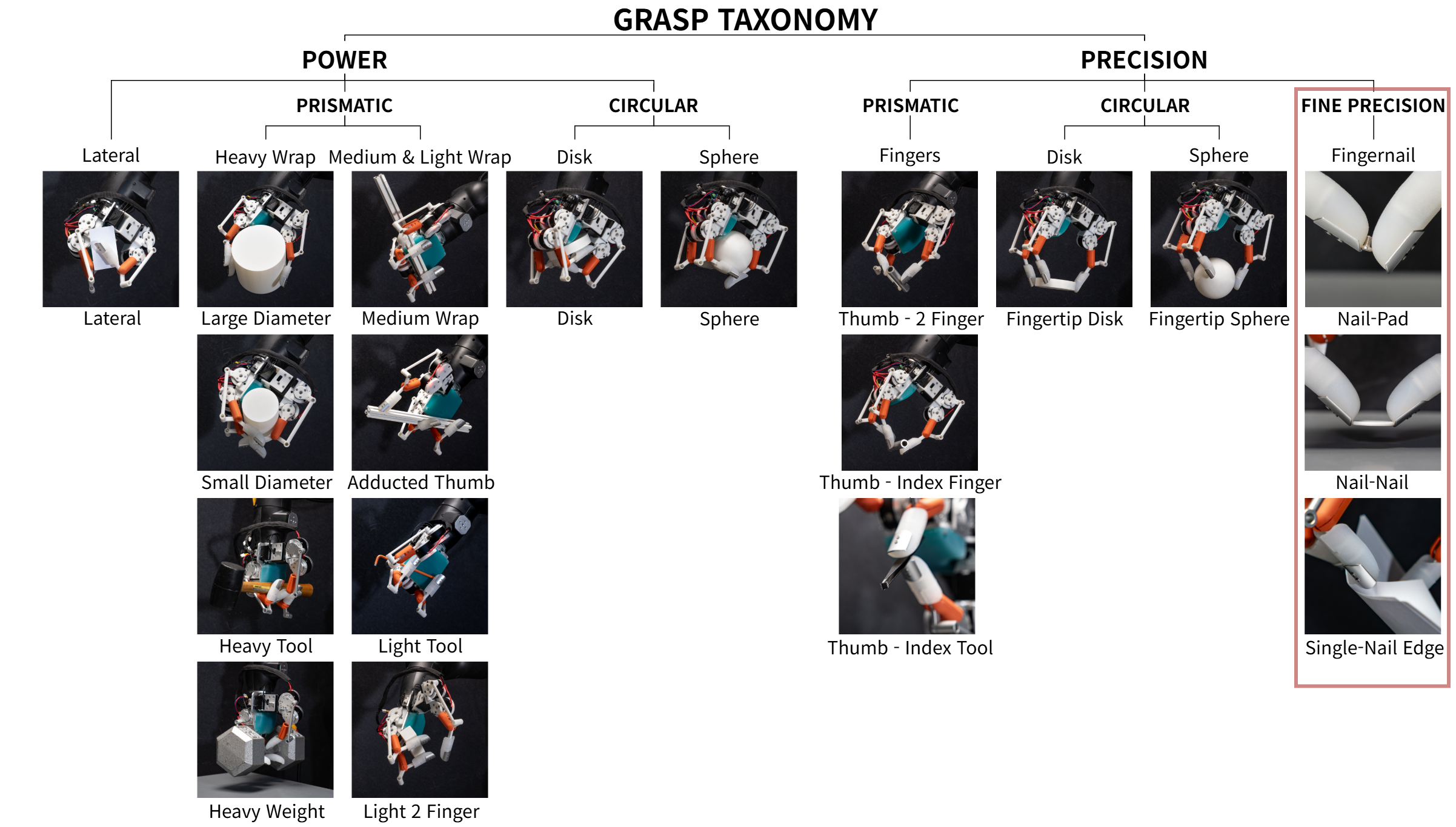
The PLATO Hand is able to achieve most tasks in the Grasp Taxonomy using three fingers; the inclusion of rigid fingernails extends its capabilities for precise manipulation tasks.